As robots increasingly operate in human-populated environments, anticipating human intentions is essential for enabling proactive and socially aware behavior. Automatic anticipation of human–robot interactions is thus emerging as a crucial perception challenge for embodied agents.
To this end, we introduce HUI360, the largest dataset for human-robot interaction anticipation in the wild and its set of baselines.
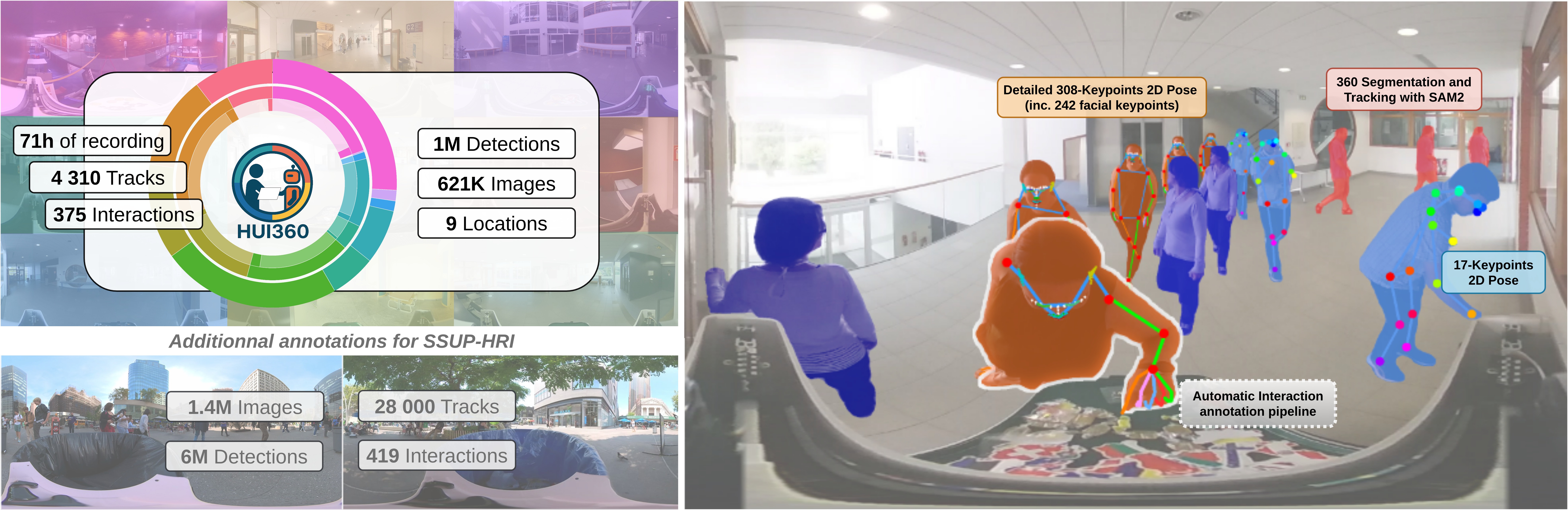
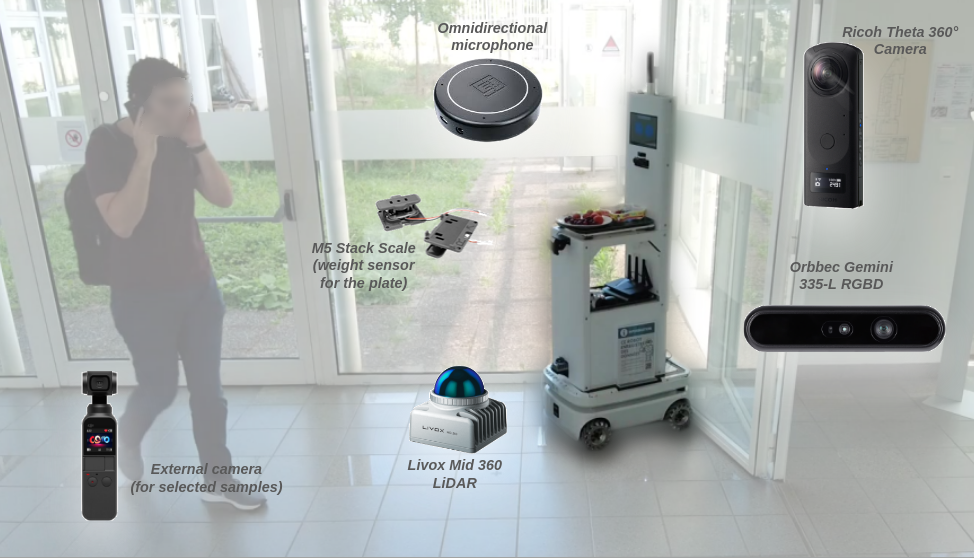
The dataset was collected from a mobile robot, in the wild, over multiple days within a 3-month period, and in several environments, capturing natural, spontaneous behaviors from both passersby and users, and encompassing a diverse range of individuals.
This variety enables evaluating and improving the generalization capabilities of interaction anticipation models.
We designed a pipeline and share code for automatic interaction annotation in arbitrary 360° equirectangular videos, along with interfaces for manual refinement.
Using this pipeline, we release the HUI360 open set of 1M pre-processed annotations, including detailed 2D poses, facial keypoints, and segmentation masks, obtained using state-of-the-art computer vision methods and manually curated to ensure high-quality tracking and interaction annotation.
Additionally, we release the raw panoptic 360° images captured from the robot’s egocentric viewpoint (on demand, for research purpose only in compliance with GDPR).
Finally, we establish benchmark baselines for interaction anticipation, including the first cross-dataset evaluations for this task: to this end, we also release 6M annotations for another existing in-the-wild outdoor dataset collected from a mobile robot (SSUP-HRI).