Abstract
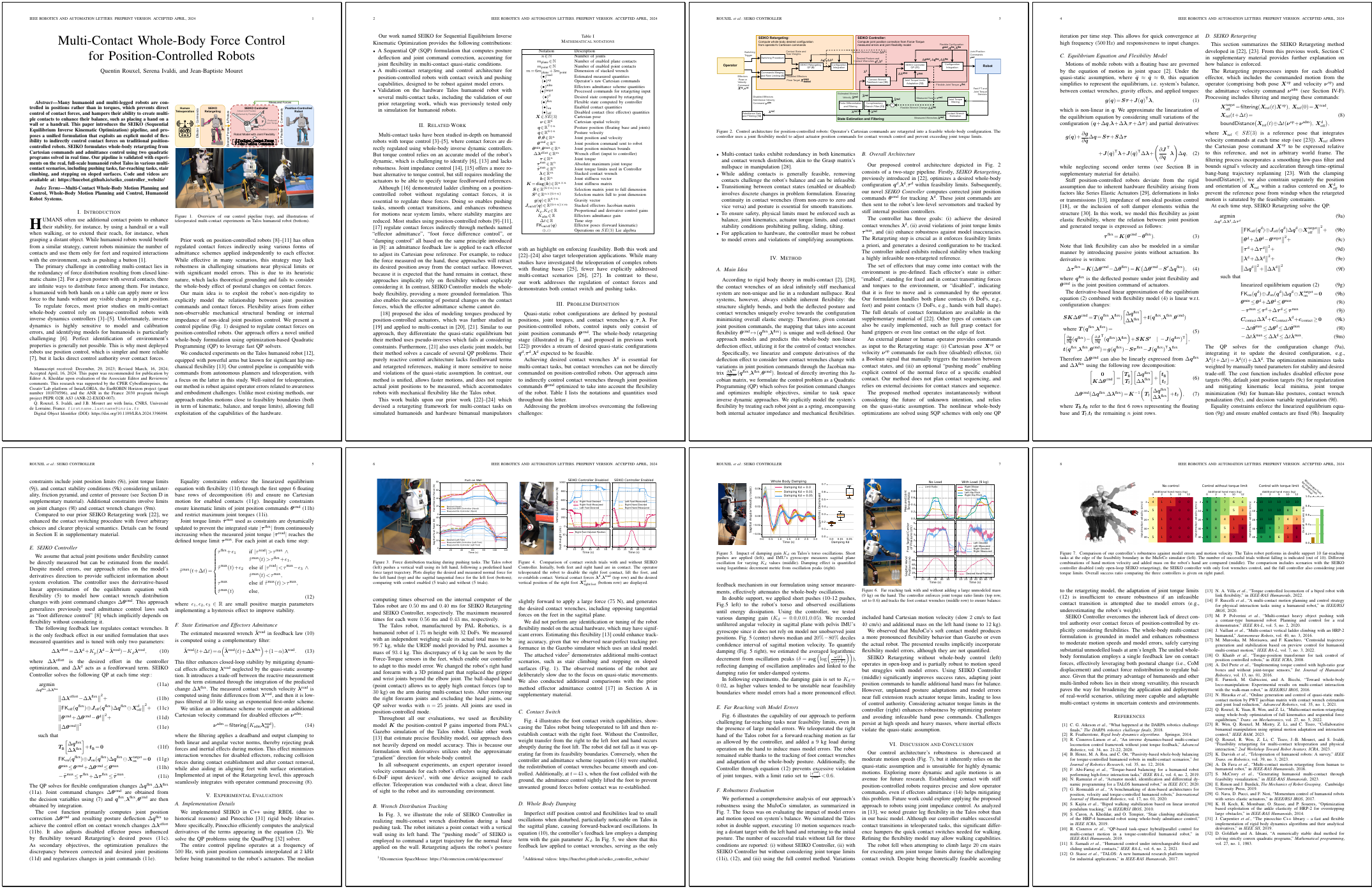
Many humanoid and multi-legged robots are controlled in positions rather than in torques, which prevents direct control of contact forces, and hampers their ability to create multiple contacts to enhance their balance, such as placing a hand on a wall or a handrail. This letter introduces the SEIKO (Sequential Equilibrium Inverse Kinematic Optimization) pipeline, and proposes a unified formulation that exploits an explicit model of flexibility to indirectly control contact forces on traditional position-controlled robots. SEIKO formulates whole-body retargeting from Cartesian commands and admittance control using two quadratic programs solved in real-time. Our pipeline is validated with experiments on the real, full-scale humanoid robot Talos in various multi-contact scenarios, including pushing tasks, far-reaching tasks, stair climbing, and stepping on sloped surfaces.
Multi-Contact Experiments on Talos Humanoid Robot
Traversal of sloped uneven ground with wall contact
Stepping up 15 cm with enhanced stability
Hand contact extends reaching distance
Testing robustness to 9 kg mass model error
Methodology
Multi-Contact Control Challenges:
- Multi-contact tasks require realizing specific contact forces
- Due to closed kinematic chains in multi-contact, perfectly rigid systems exhibit redundancy in force distribution: for the same posture, multiple force distributions can exist
- Position-controlled robots cannot directly control contact forces
Objective:
Control contact forces on position-control robots to perform multi-contact tasksMain Ideas:
- Real systems, including stiff position-controlled robots, inherently possess flexibilities arising from structural bending and internal actuator impedance
- In presence of flexibilities, the actual system's force distribution is unique, determined by the configuration that minimizes the overall whole-body elastic energy
- Despite being unobservable, flexibilities can be modeled and predicted through nonlinear whole-body optimization
- This unique and well defined configuration depends on joint position commands
-
By
inverting
this relationship, joint position commands are optimized to produced a desired contact force distribution
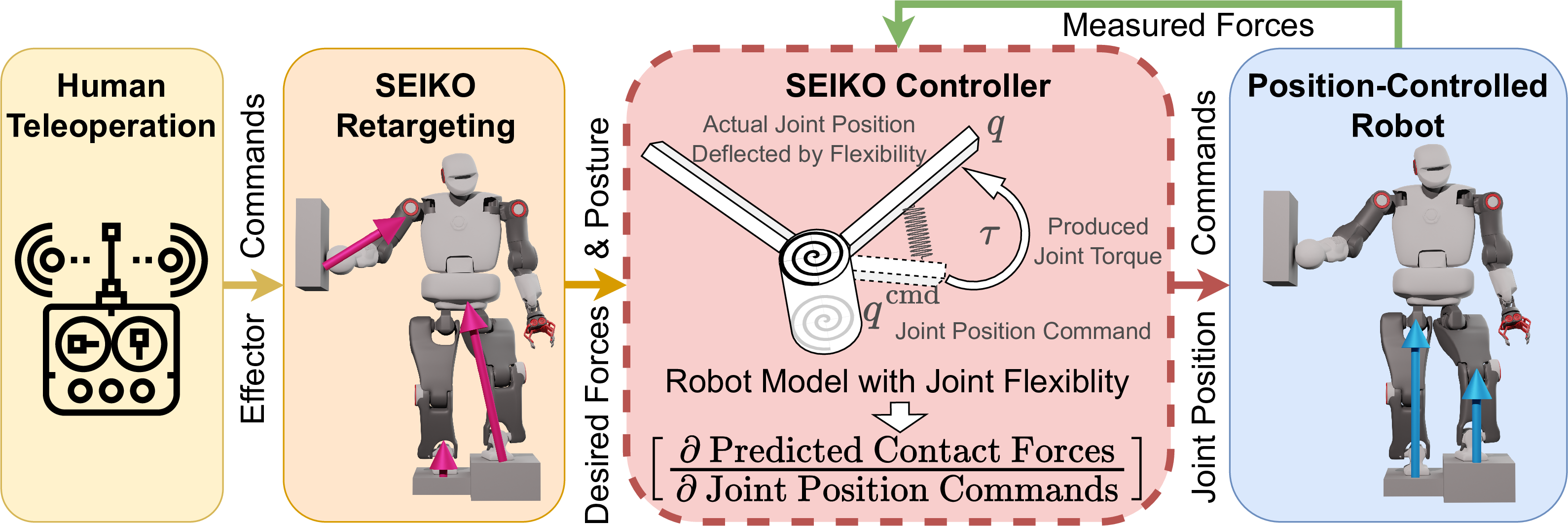
Control Pipeline (SEIKO):
- Input: Cartesian motion commands for each effector (position and/or velocity)
- Output: corrected joint position commands realizing desired contact forces
- In our experiments, a human operator teleoperates the robot, but input commands could alternatively come from an autonomous planner
- SEIKO Retargeting computes feasible desired whole-body configurations from given commands
- SEIKO Controller updates joint position commands to indirectly regulate contact forces using a model of flexibilities.

Controller's Capabilities
Smooth contact switching
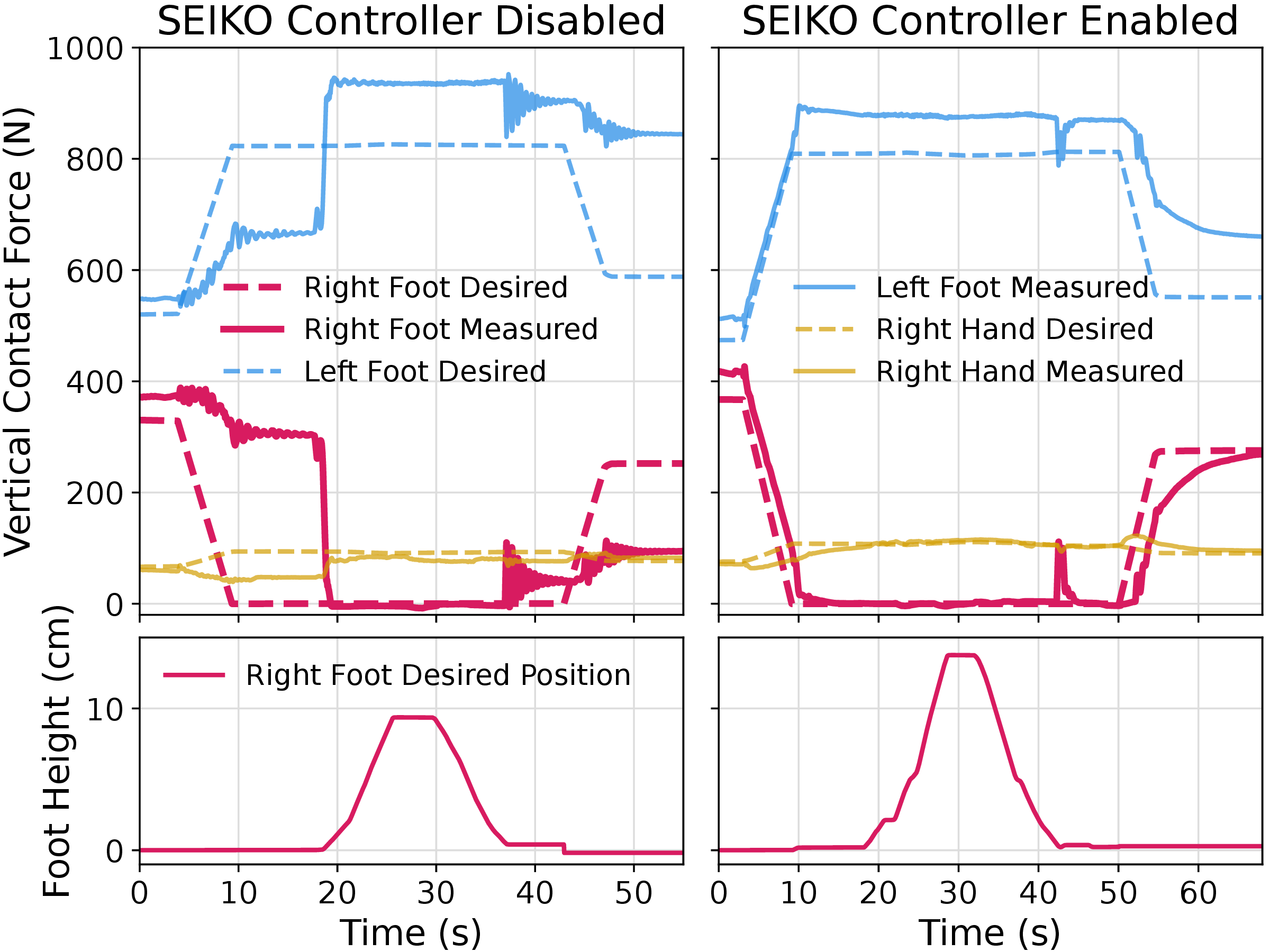
Pushing task tracking hand contact force

Far reach with and without unmodeled load

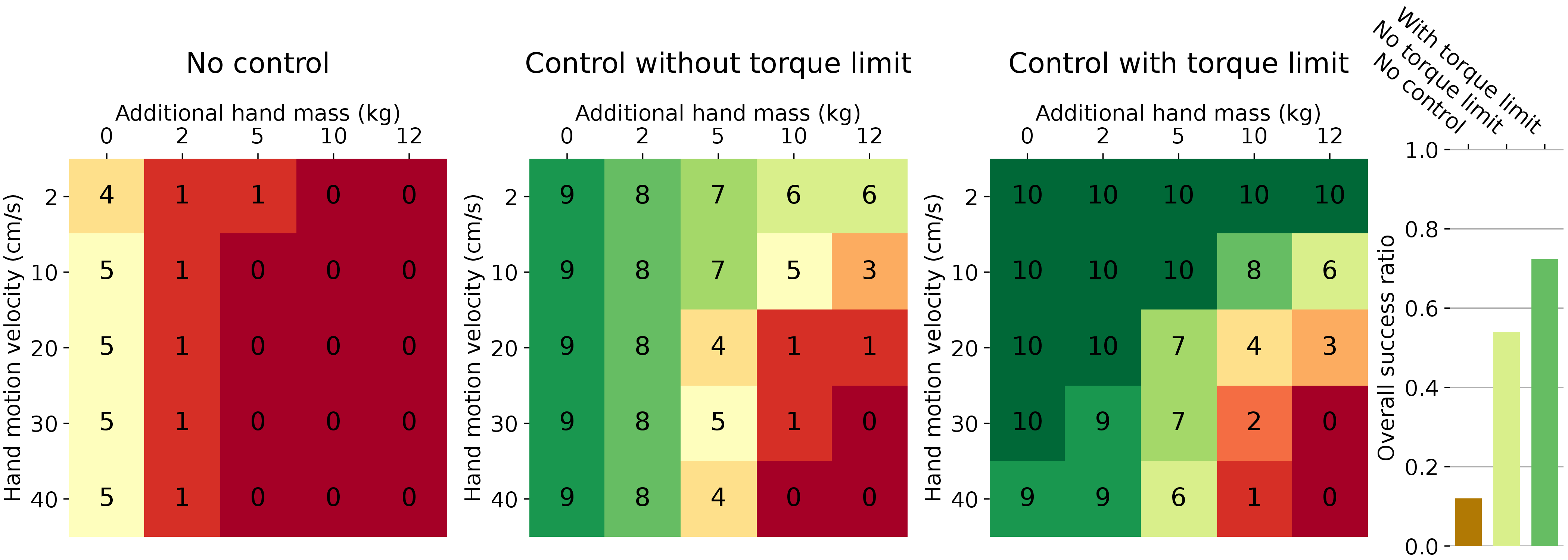
Robustness Against Motion Speed and Model Error
BibTeX
@article{rouxel2024multicontact,
title={Multi-Contact Whole-Body Force Control for Position-Controlled Robots},
author={Rouxel, Quentin and Ivaldi, Serena and Mouret, Jean-Baptiste},
journal={IEEE Robotics and Automation Letters},
year={2024},
publisher={IEEE}
}Related Projects
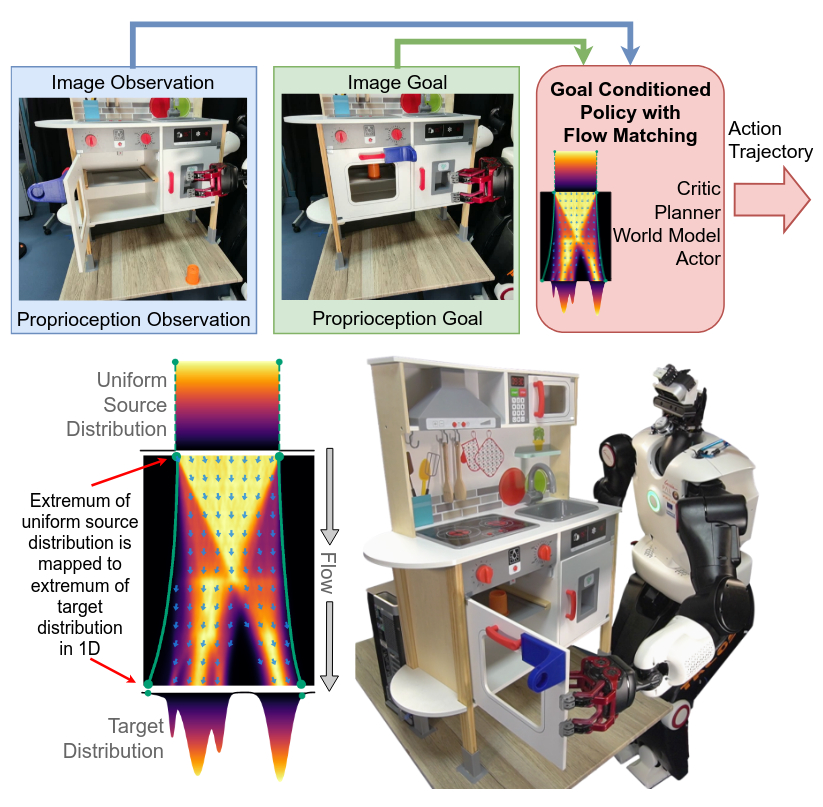
Extremum Flow Matching (2025)
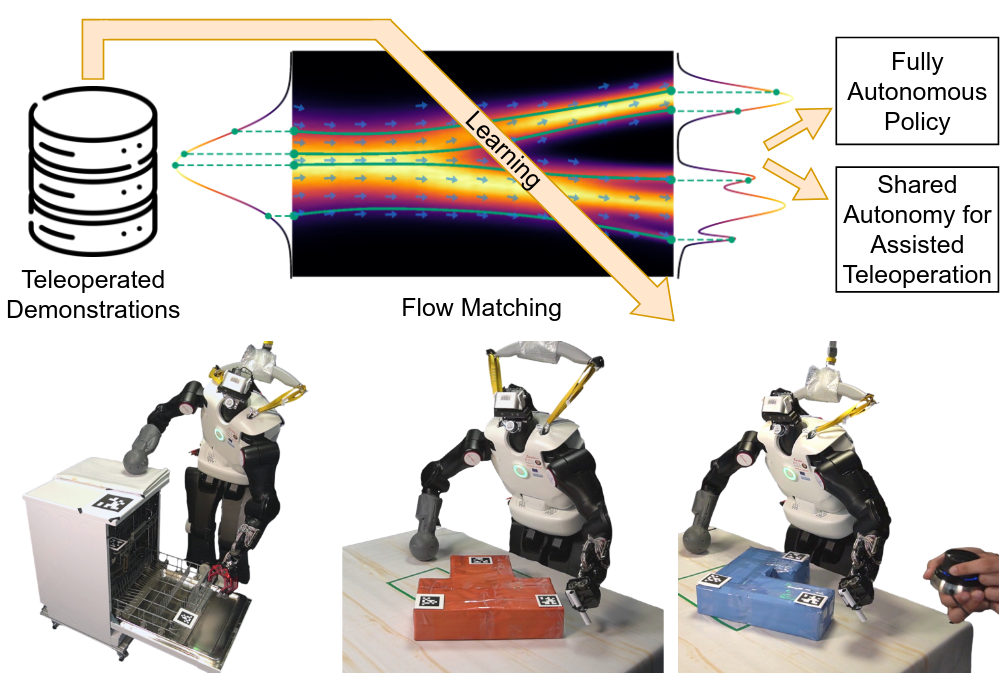
Flow Multi-Support (2024)
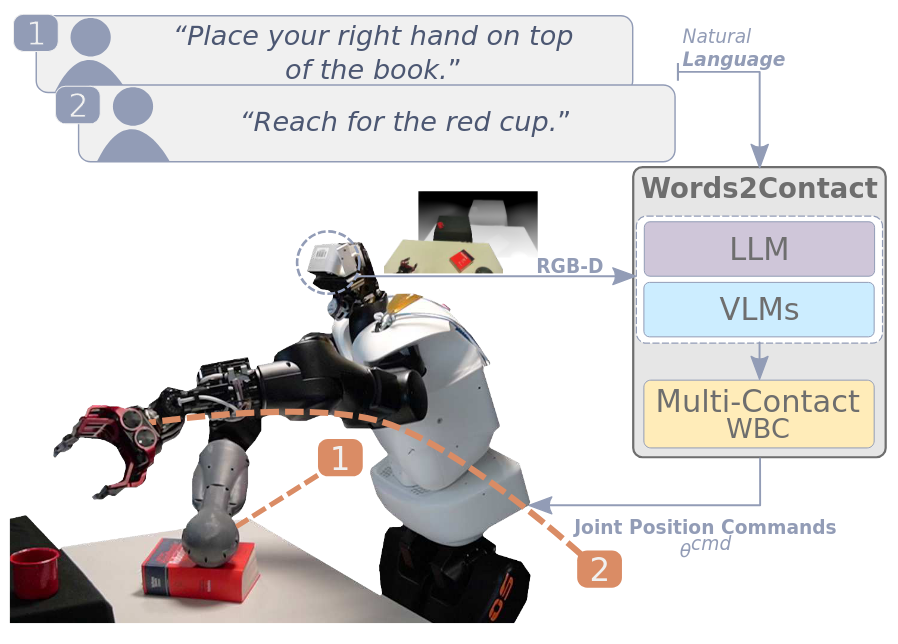
Words2Contact (2024)
2024